


single pivot suspension

 02-22-06, 09:46 AM
02-22-06, 09:46 AM
#27
Te mortuo heres tibi sim?

Join Date: Aug 2004
Location: East coast
Posts: 3,486
Bikes: hardtail, squishy, fixed roadie, fixed crosser
Mentioned: 0 Post(s)
Tagged: 0 Thread(s)
Quoted: 0 Post(s)
Likes: 0
Liked 0 Times
in
0 Posts
depends on how you ride. some people feel brake jack actually does the reverse, and makes the suspension squat into corners better. some poeple don't mind it, some people don't even notice it.
again, go test ride as many bikes as you can. don't just ask for advice here. it's all about what bike fits and feels good *to you* and not what a bunch of internet strangers tell you.
again, go test ride as many bikes as you can. don't just ask for advice here. it's all about what bike fits and feels good *to you* and not what a bunch of internet strangers tell you.
02-22-06, 09:54 AM
#28

Throw the stick!!!!

This is a rather large purchase. You need to get out there and ride the bikes and make your own decision.
__________________
I may be fat but I'm slow enough to make up for it.
02-22-06, 11:26 AM
#29
Senior Member
Thread Starter

Join Date: Jan 2006
Location: Santa Cruz
Posts: 425
Bikes: doesnt matter. just ride.
Mentioned: 0 Post(s)
Tagged: 0 Thread(s)
Quoted: 0 Post(s)
Likes: 0
Liked 0 Times
in
0 Posts
cool guys, thanks for your help. i think if im going to get a full suspension, it will be the heckler. it wont be for a while though. i cant wait to go and test ride it.
02-23-06, 01:32 AM
#30
Senior Member

Join Date: Aug 2005
Location: Malaysia
Posts: 1,747
Bikes: 2017 Specialized Roubaix, 2007 Giant Anthem, Polygon Quatro
Mentioned: 1 Post(s)
Tagged: 0 Thread(s)
Quoted: 103 Post(s)
Likes: 0
Liked 0 Times
in
0 Posts
also take note, if you are trying the heckler try a GiantReign, I heard a lot of people decided to buy a Reign instead of a Heckler. In short, try a lot of bikes if possible, dont keep your mind close and think the Heckler is your best bike, for me after a while I have found out that im more of a Trail/XC rider so im getting Trance cause im not a rider who loves big hits
02-23-06, 04:38 AM
#31
Ride bike or bike ride?

Join Date: Oct 2003
Location: Adelaide, Australia
Posts: 1,447
Bikes: MongoosePro DH, Dart custom road bike, .243 Racing FR street bike
Mentioned: 0 Post(s)
Tagged: 0 Thread(s)
Quoted: 0 Post(s)
Likes: 0
Liked 0 Times
in
0 Posts
Single pivot, not the most advanced design (actually yhte least advanced  ) but is the most reliable, and if executed well very nice. Heckler pivot position is pretty low so should pedal well and have less pedal feed back. Also being a shorter travel bike, the more noticeable flaws of single pivots won't be as noticeable. On a side note many four bars have a very similar axel path to single pivots (don't let the marketing hype get to you). Also to brake jack/squat, Hank sorry i don't know who you are but you bring up an interesting question. Brake Jack is negligeble, it is a tiny flaw manufacturers have played *cough* Specialized *cough*. Yes it exists, NO it is not as huge as the market wants you to believe.
) but is the most reliable, and if executed well very nice. Heckler pivot position is pretty low so should pedal well and have less pedal feed back. Also being a shorter travel bike, the more noticeable flaws of single pivots won't be as noticeable. On a side note many four bars have a very similar axel path to single pivots (don't let the marketing hype get to you). Also to brake jack/squat, Hank sorry i don't know who you are but you bring up an interesting question. Brake Jack is negligeble, it is a tiny flaw manufacturers have played *cough* Specialized *cough*. Yes it exists, NO it is not as huge as the market wants you to believe.
I am feeling kind and am going to post something I did AGES ago, it is very long, but is based purely on maths and physics, given these calculations are very simple, it is pretending as though the rider's weight is is in the centre of mass of the bike. Yes there will be huge differences in how the braking will effect the rear end. This is a very simple model! BUT it's basic underlying principal shows how very negligible the force of brake jack is
) but is the most reliable, and if executed well very nice. Heckler pivot position is pretty low so should pedal well and have less pedal feed back. Also being a shorter travel bike, the more noticeable flaws of single pivots won't be as noticeable. On a side note many four bars have a very similar axel path to single pivots (don't let the marketing hype get to you). Also to brake jack/squat, Hank sorry i don't know who you are but you bring up an interesting question. Brake Jack is negligeble, it is a tiny flaw manufacturers have played *cough* Specialized *cough*. Yes it exists, NO it is not as huge as the market wants you to believe.I am feeling kind and am going to post something I did AGES ago, it is very long, but is based purely on maths and physics, given these calculations are very simple, it is pretending as though the rider's weight is is in the centre of mass of the bike. Yes there will be huge differences in how the braking will effect the rear end. This is a very simple model! BUT it's basic underlying principal shows how very negligible the force of brake jack is
02-23-06, 04:39 AM
#32
Ride bike or bike ride?
Join Date: Oct 2003
Location: Adelaide, Australia
Posts: 1,447
Bikes: MongoosePro DH, Dart custom road bike, .243 Racing FR street bike
Mentioned: 0 Post(s)
Tagged: 0 Thread(s)
Quoted: 0 Post(s)
Likes: 0
Liked 0 Times
in
0 Posts
Ok let us begin, chain suck is a problem where the chain grows through it's travel, this causes tension and it can be pulled, this forces pedal feed back through the cranks, this can be imprved by having a pivot design that pivots around the BB.
Now brake jack is a much more complicated thing. I am going to copy a post from another website, it is very VERY long so bare with me. It was written by uni student and is a 'basic' model and also discusses the pro's and cons of designing a bike so that it squats or jacks under braking.
Warning: very, very long posts.
Since there�s been a lot of incorrect explanations and theories on brake induced suspension interference (BISI), here�s a full explanation with diagrams. If you�re just interested in what happens but not so much �why� then skip to the end, most of this is just a reiteration of commonly-understood physics and its application to bicycles in relation to braking.
Disclaimer: this article is purely intended for demonstration of the basic concepts of BISI. It is not a full quantitative method of calculation, nor should it be used as such. Calculations shown deliberately omit various less-significant/more complex factors such as moments of inertia, weight shift, centres of mass etc. The article remains a fair approximation of the basics of BISI, but if you wish to calculate the precise reaction to braking that your bicycle has then you must be aware of the other factors, and know how to incorporate them. Keep in mind too, that motion characteristic generation (ie designing for a characteristic) is much more difficult than simply analysing an existing system.
The physics:
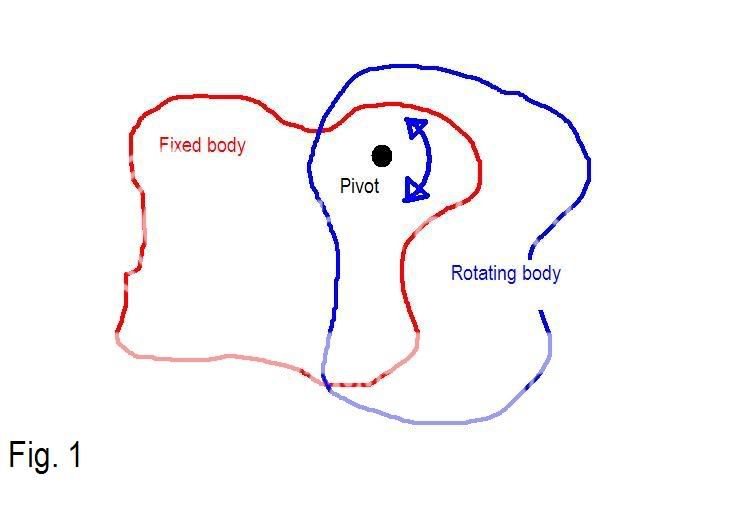
Imagine you have a random rigid structure/body attached to another, fixed rigid structure/body by means of a simple pivot, so that when the fixed (stationary) body is taken as a point of reference, the other one is free to rotate around the pivot that joins them. (Fig 1)
Now imagine if you had the same thing, but you applied a force at any random point on the rotating body. The force can be broken up into its vector components relative to the pivot, which are called the normal (directly towards/away from the pivot) and tangential (perpendicular to the normal) components, as shown. (Fig 2)
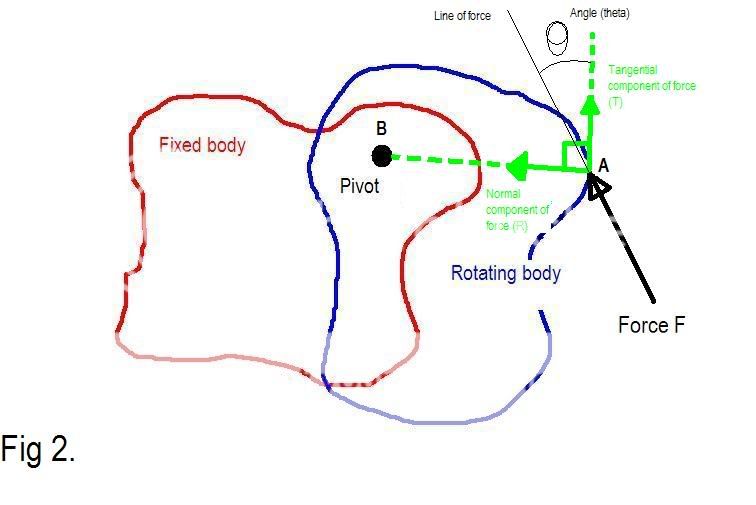
The concept of a moment is fairly basic � it is the product of a force and its perpendicular distance from another reaction force (which prevents the body from translating, ie moving in a straight line) at a fixed point (in this case the pivot), and measures their coupled tendency to cause a body to rotate. In other words, the tangential component of force F in figure 2 (since it is perpendicular to the normal force at point A), multiplied by the distance between point A and point B (the pivot), gives the moment acting on the rotating body, about point B. The tangential component of force is given by F x cos(q). So the moment about point B is Fcos(q) x dist(AB). Not too complicated. This is pretty easy to visualise � imagine lifting your front wheel off the ground (brakes not being applied) and pushing against the tyre with your hand. If you push directly in at the axle (perpendicular to the tyre/rim at that point; this is a purely �normal� force) then the wheel will not spin, and you will cause an equal and opposite reaction force on the wheel from the axle. However, if you push parallel to the tyre�s surface at that point (tangent to its path) then you will cause the wheel to spin. Anywhere in between will give a combination of the two � pretty obvious.
Newton�s second law of motion: SF = m x Sa
(the �S� means �sum of�, or �net�). That is to say, if there is a net force (that is not zero), there will be a net acceleration (in the same direction as the force is acting, obviously), directly proportional to the force applied and inversely proportional to the mass (due to the mass�s inertia resisting movement). The same applies to moments � the sum of all moments is equal to the body�s mass moment of inertia (the rotational equivalent of normal inertia) multiplied by the angular (rotational) acceleration. For the moment (no pun intended) you only need to understand the basic concept of this, not the technicalities (which are fairly complex).
Newton�s third law: For every action (force) there is an equal and opposite reaction (force). This gives us the concept of static equilibrium � if a body is supported in such a way that it cannot move (relative to your reference frame) then any force acting on it will generate reaction forces at its supports. Depending on the supports holding a body, it will be considered either statically determinate or statically indeterminate. If the body is statically determinate you can work out reaction forces based on basic equilibrium equations (forces acting in the X direction, forces in the Y direction, and moments about any given point), in other words it�s fairly simple to deal with. If the body is statically indeterminate, you will burn it at the stake and write several books specifically concentrating on denying that it ever existed (it�s much easier than doing the calculations). Fortunately, bicycle suspension components are (in the plane which they are intended to move, ie discounting lateral flex etc) nearly always statically determinate (and those which technically are not, can be approximated as being determinate anyway). If this sounds complicated, that�s because you�re not reading my mind well enough.
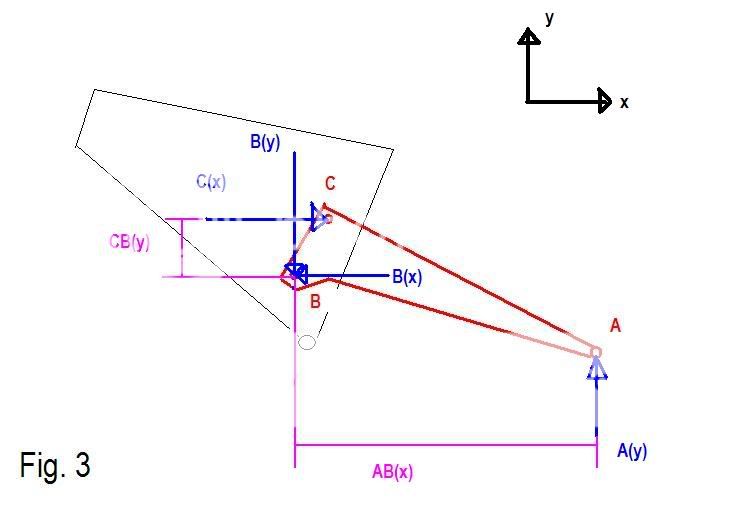
First we will look at a basic bicycle (single pivot) swingarm, (initially) having three points of attachment to the outside world. These points are point A (the axle), point B (the pivot), and point C (the shock mount). Note specifically that all three points are pivots and are free to rotate relative to the bodies to which they are attached (the front triangle, the shock, and the wheel). If you�re wondering why the axle is a pivot, it�s because the rear wheel is attached via bearings, and cannot exert a moment on the axle itself (because if you spin the wheel, it will simply rotate freely around the axle � leaving braking forces and chain interference out of the picture, and assuming that there is negligible friction in the wheel bearings). So the wheel and the swingarm can rotate independently of each other at this time. Assume the bicycle is on flat ground.
At sag, when the suspension is not cycling (moving), the bike�s swingarm is in a state of static equilibrium (all forces and moments sum to zero). See fig 3 � blue lines are forces acting at the various points, pink lines and letters are to show the notation used for the distances from C to B (vertically), and A to B (horizontally). Note that the force at A (the axle) can ONLY be vertical because any non-vertical (ie tangential) force at the tyre will simply rotate the wheel around the axle, transferring no force to the axle other than the vertical (normal) component. Also note that the force at C is only horizontal (axial to the shock) as shocks can only transfer load ALONG their axis (quite obviously � any force on the shock that is not along its axis will simply rotate it about its other mounting point). For ease of calculation, we will neglect the shock�s rotation relative to the front triangle, and assume it stays horizontal at all times.
Ok, so now into some basic calculations. Assume that A(y) is a given force on the axle. Since the swingarm is in equilibrium, moments about ANY point on the swingarm must sum to zero. For ease of calculation we will start with point B. Positive moments are taken to be clockwise:
SM(B) = 0
= [A(y) * -AB(x)] + [C(x) * CB(y)] Note that AB(x) has a negative sign in front of it
[A(y) * -AB(x)] + [C(x) * CB(y)] = 0
[A(y) * AB(x)] = [C(x) * CB(y)]
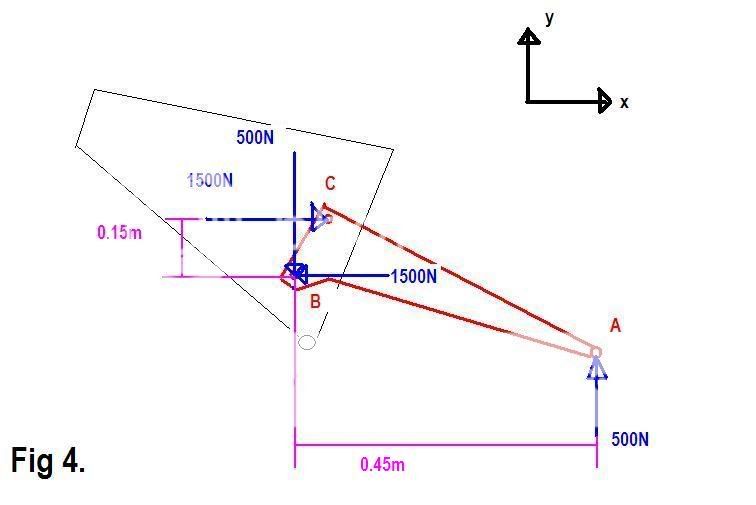
If we let AB(x) = 0.45 metres (realistic measurement), A(y) = 500N (again not unrealistic, this is equivalent to about 50kg), and CB(y) = 0.15 metres (we will assume that this distance does not change significantly over the stroke of the suspension, for ease of calculation), then we get:
[500 * 0.45] = [C(x) * 0.15] Divide both sides by 0.15 to calculate C(x)
[500 * 0.45]/0.15 = C(x)
C(x) = 1500N (this is roughly equivalent to 330lb � if you had a 330lb/inch spring you would get 1 inch shock stroke sag, which given the 3:1 shock leverage ratio would be 3� of sag at the axle � again, a realistic example).
So now we have calculated C(x) using basic equilibrium formulae. The only unknowns left are B(x) and B(y). Note that in Fig. 3 these forces are drawn in the opposite directions to C(x) and A(y) respectively. To calculate these we have two choices � balancing moments about either A or C, or balancing forces in the X and Y directions. Balancing the forces is easier since in this example all the forces are either horizontal or vertical, and we have no measurements for some of the distances necessary to sum moments about A or C.
SF(x) = 0
= C(x) � B(x) Minus B(x) because it is acting in the negative direction
\ C(x) = B(x)
B(x) = C(x) = 1500N
SF(y) = 0
= A(y) � B(y)
\ A(y) = B(y) = 500N
Hence we now have the reaction forces (Fig. 4)
Now consider a free body diagram of a wheel with a disc brake rotor attached, under braking forces. Assume the caliper is directly above the axle for ease of calculation. (Fig. 5)
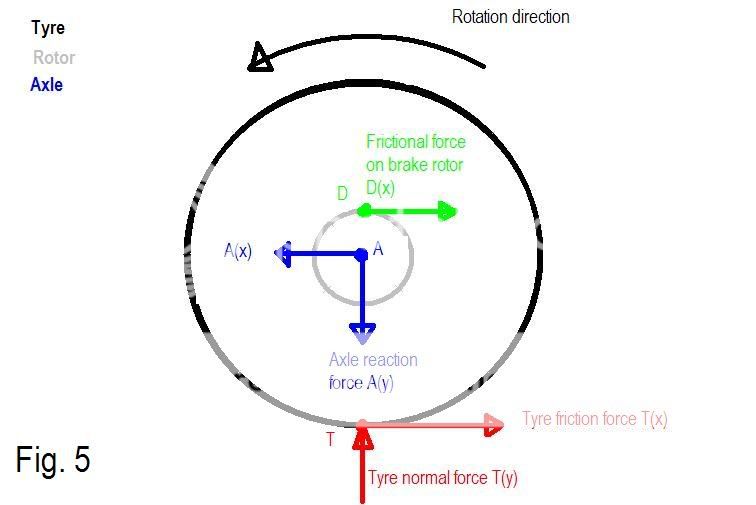
Assume that the bike, despite braking, is maintaining a constant speed (as though it�s rolling down a hill with the brakes applied to a level where constant speed is held). Due to the wheel�s axisymmetric structure (it is identical all the way around, ie everything is concentric about the axle � brake rotor, rim/tyre etc), if we are to neglect the wheel�s own rotational momentum (because relative to the other forces/momentums at play, it can be considered insignificant) then the wheel can be modeled as though it is in static equilibrium (since we�re not worried about loads internal to the wheel, only the external forces and reactions) � all (external) forces and moments sum to zero. Assume the radius of the whole wheel (to the outside of the tyre) is 0.33m (13�) and the radius of the disc rotor is 100mm (4�). Let us choose an arbitrary force for T(x), which we will say is 200N. Take positive rotation to be clockwise.
Thus:
SM(A) = 0 summing moments about the axle
= [T(x) * -0.33] + [D(x) * 0.1]
= [200 * -0.33] + [D(x) * 0.1]
200 * 0.33 = D(x) * 0.1
\ D(x) = 660N
SF(x) = 0
= D(x) + T(x) � A(x)
= 660 + 200 � A(x)
\ A(x) = 860N (pointing to the left in the diagram)
SF(y) = 0
= T(y) � A(y)
\ A(y) = T(y)
If we take axle force to be 500N once again, then
A(y) = T(y) = 500N
Now we will look at the reaction forces acting on the swingarm. Note that the forces are identical in magnitude at all points of attachment/contact with the wheel (that is, the axle and the caliper) but act on the swingarm in the opposite direction to the directions they act on the wheel (Newton�s action/reaction pairs). (Fig. 6)
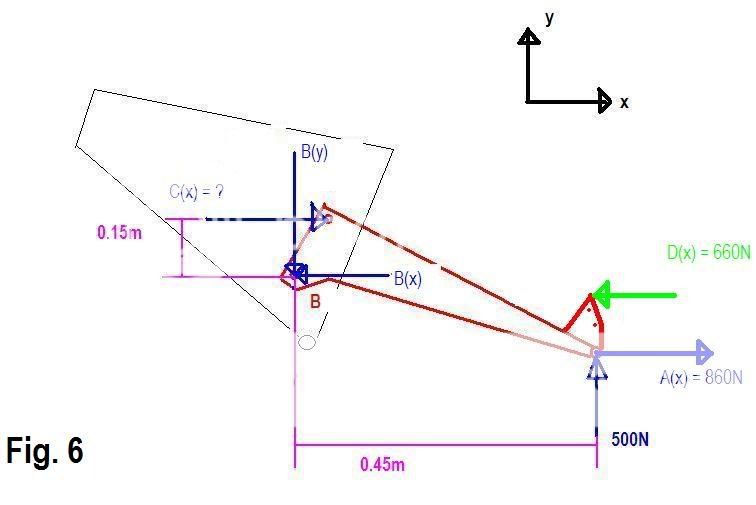
Note that the force acting horizontally on the axle (with regards to the frame, not the wheel) is the sum of the frictional force on the tyre, and the frictional force on the brake rotor, and that it is always higher in magnitude than the braking frictional force between the caliper/rotor � if it wasn�t, braking would actually accelerate the bike forwards due to a net forwards force acting on it (which obviously is impossible).
From here we have two options to analyse the effect of this braking force on the swingarm. Firstly and most obviously, we can simply use each point force (X and Y components acting on the axle, and the X component on the brake caliper) and their respective normal distances from the main pivot (at B) to calculate the moment about B and thus the reaction force C(x) (as well as the reactions B(x) and B(y) if we so desire). If the reaction force C(x) increases, then that means that the shock�s resistance/spring force has to increase (and the opposite is obviously also true). Given the nature of springs, we know that to increase the shock�s reaction force, it has to sit further into its stroke in order to compress the spring to suit.
The second method, and one which will prove more useful later on when considering linkage bikes/floating brakes, is to consider the forces acting on the swingarm from the caliper and the axle as a single couple moment (generated by the caliper force pushing forwards, and an equal force pushing backwards at the axle so as to have no net force in any direction) plus a horizontal force at the axle instead of two separate forces. In the diagrams shown, this couple moment would be anti-clockwise. This method has the advantage of being able to separate these two components so that we can recognise the following things:
- Regardless of the orientation of the caliper or its distance from the axle, the couple moment will remain the same for any given frictional force on the tyre; this is because that frictional force multiplied by the radius of the wheel is what gives the magnitude of the moment and it is independent of rotor size (note though that the caliper/axle forces change inversely proportional to rotor radius however).
- There are two elements which can semi-independently cause BISI, and thus are separable: these are axle path/horizontal axle force and the couple moment. Couple moments can easily be removed from the equation of by parallel linkages (including floating brakes) which will be covered later, and the horizontal force acting on the axle needs a moment arm (perpendicular to the line of force, so in other words a vertical distance) between the axle and the swingarm pivot, in order to generate a moment about the pivot. As such, both factors need to be taken into account when considering brake interference. It is possible (but not necessarily desirable) to create a setup where these two factors cancel each other out (this will be elaborated on later).
- What determines the amount of squat (or jack, but that will be dealt with later) is determined by two things: the height of the pivot (or instant centre, explanation of instant centre to follow shortly), and the length of the swingarm. The height of the pivot/IC is what determines the vertical distance (which is the moment arm as mentioned before) between the pivot and the axle, and so a higher pivot = longer moment arm = more squat generated by horizontal axle forces. The length of the swingarm changes the effects of the couple moment (which is effectively a constant for whatever calculation you�re doing) by altering the moments generated by the vertical force on the axle and the force of the shock on the swingarm, about the main pivot. For example, if, as above, the axle was 0.45m from the main pivot and the vertical force on the axle was 500N, the moment generated by that (which has to be equaled by the shock�s force multiplied by its normal distance [0.15m] from the pivot) would be 225N.m. A couple moment of say 22.5N.m would be an increase of 10% in this case, which if the shock rate was perfectly linear, would make the bike sit 10% further into its travel in order to regain equilibrium. Now consider that the swingarm was twice the size in every dimension; ie axle to pivot is 0.9m, and pivot to shock mount is 0.3m. The shock ratio is still the same so the shock doesn�t have to supply any additional force at equilibrium. However, the moments (note that these are not �net� moments and as such we are not concerned with acceleration) are now doubled also due to the doubled moment arms � that is to say, the axle force/swingarm length would yield a moment of (0.9 * 500 = 450N.m) that the shock would obviously balance out in the opposite direction. However, an addition of the 22.5N.m couple moment via braking is only a 5% increase now, half of what it was before. From this we can see that swingarm length is inversely proportional to squat generated by the couple moment alone.
Now brake jack is a much more complicated thing. I am going to copy a post from another website, it is very VERY long so bare with me. It was written by uni student and is a 'basic' model and also discusses the pro's and cons of designing a bike so that it squats or jacks under braking.
Warning: very, very long posts.
Since there�s been a lot of incorrect explanations and theories on brake induced suspension interference (BISI), here�s a full explanation with diagrams. If you�re just interested in what happens but not so much �why� then skip to the end, most of this is just a reiteration of commonly-understood physics and its application to bicycles in relation to braking.
Disclaimer: this article is purely intended for demonstration of the basic concepts of BISI. It is not a full quantitative method of calculation, nor should it be used as such. Calculations shown deliberately omit various less-significant/more complex factors such as moments of inertia, weight shift, centres of mass etc. The article remains a fair approximation of the basics of BISI, but if you wish to calculate the precise reaction to braking that your bicycle has then you must be aware of the other factors, and know how to incorporate them. Keep in mind too, that motion characteristic generation (ie designing for a characteristic) is much more difficult than simply analysing an existing system.
The physics:
Imagine you have a random rigid structure/body attached to another, fixed rigid structure/body by means of a simple pivot, so that when the fixed (stationary) body is taken as a point of reference, the other one is free to rotate around the pivot that joins them. (Fig 1)
Now imagine if you had the same thing, but you applied a force at any random point on the rotating body. The force can be broken up into its vector components relative to the pivot, which are called the normal (directly towards/away from the pivot) and tangential (perpendicular to the normal) components, as shown. (Fig 2)
The concept of a moment is fairly basic � it is the product of a force and its perpendicular distance from another reaction force (which prevents the body from translating, ie moving in a straight line) at a fixed point (in this case the pivot), and measures their coupled tendency to cause a body to rotate. In other words, the tangential component of force F in figure 2 (since it is perpendicular to the normal force at point A), multiplied by the distance between point A and point B (the pivot), gives the moment acting on the rotating body, about point B. The tangential component of force is given by F x cos(q). So the moment about point B is Fcos(q) x dist(AB). Not too complicated. This is pretty easy to visualise � imagine lifting your front wheel off the ground (brakes not being applied) and pushing against the tyre with your hand. If you push directly in at the axle (perpendicular to the tyre/rim at that point; this is a purely �normal� force) then the wheel will not spin, and you will cause an equal and opposite reaction force on the wheel from the axle. However, if you push parallel to the tyre�s surface at that point (tangent to its path) then you will cause the wheel to spin. Anywhere in between will give a combination of the two � pretty obvious.
Newton�s second law of motion: SF = m x Sa
(the �S� means �sum of�, or �net�). That is to say, if there is a net force (that is not zero), there will be a net acceleration (in the same direction as the force is acting, obviously), directly proportional to the force applied and inversely proportional to the mass (due to the mass�s inertia resisting movement). The same applies to moments � the sum of all moments is equal to the body�s mass moment of inertia (the rotational equivalent of normal inertia) multiplied by the angular (rotational) acceleration. For the moment (no pun intended) you only need to understand the basic concept of this, not the technicalities (which are fairly complex).
Newton�s third law: For every action (force) there is an equal and opposite reaction (force). This gives us the concept of static equilibrium � if a body is supported in such a way that it cannot move (relative to your reference frame) then any force acting on it will generate reaction forces at its supports. Depending on the supports holding a body, it will be considered either statically determinate or statically indeterminate. If the body is statically determinate you can work out reaction forces based on basic equilibrium equations (forces acting in the X direction, forces in the Y direction, and moments about any given point), in other words it�s fairly simple to deal with. If the body is statically indeterminate, you will burn it at the stake and write several books specifically concentrating on denying that it ever existed (it�s much easier than doing the calculations). Fortunately, bicycle suspension components are (in the plane which they are intended to move, ie discounting lateral flex etc) nearly always statically determinate (and those which technically are not, can be approximated as being determinate anyway). If this sounds complicated, that�s because you�re not reading my mind well enough.
First we will look at a basic bicycle (single pivot) swingarm, (initially) having three points of attachment to the outside world. These points are point A (the axle), point B (the pivot), and point C (the shock mount). Note specifically that all three points are pivots and are free to rotate relative to the bodies to which they are attached (the front triangle, the shock, and the wheel). If you�re wondering why the axle is a pivot, it�s because the rear wheel is attached via bearings, and cannot exert a moment on the axle itself (because if you spin the wheel, it will simply rotate freely around the axle � leaving braking forces and chain interference out of the picture, and assuming that there is negligible friction in the wheel bearings). So the wheel and the swingarm can rotate independently of each other at this time. Assume the bicycle is on flat ground.
At sag, when the suspension is not cycling (moving), the bike�s swingarm is in a state of static equilibrium (all forces and moments sum to zero). See fig 3 � blue lines are forces acting at the various points, pink lines and letters are to show the notation used for the distances from C to B (vertically), and A to B (horizontally). Note that the force at A (the axle) can ONLY be vertical because any non-vertical (ie tangential) force at the tyre will simply rotate the wheel around the axle, transferring no force to the axle other than the vertical (normal) component. Also note that the force at C is only horizontal (axial to the shock) as shocks can only transfer load ALONG their axis (quite obviously � any force on the shock that is not along its axis will simply rotate it about its other mounting point). For ease of calculation, we will neglect the shock�s rotation relative to the front triangle, and assume it stays horizontal at all times.
Ok, so now into some basic calculations. Assume that A(y) is a given force on the axle. Since the swingarm is in equilibrium, moments about ANY point on the swingarm must sum to zero. For ease of calculation we will start with point B. Positive moments are taken to be clockwise:
SM(B) = 0
= [A(y) * -AB(x)] + [C(x) * CB(y)] Note that AB(x) has a negative sign in front of it
[A(y) * -AB(x)] + [C(x) * CB(y)] = 0
[A(y) * AB(x)] = [C(x) * CB(y)]
If we let AB(x) = 0.45 metres (realistic measurement), A(y) = 500N (again not unrealistic, this is equivalent to about 50kg), and CB(y) = 0.15 metres (we will assume that this distance does not change significantly over the stroke of the suspension, for ease of calculation), then we get:
[500 * 0.45] = [C(x) * 0.15] Divide both sides by 0.15 to calculate C(x)
[500 * 0.45]/0.15 = C(x)
C(x) = 1500N (this is roughly equivalent to 330lb � if you had a 330lb/inch spring you would get 1 inch shock stroke sag, which given the 3:1 shock leverage ratio would be 3� of sag at the axle � again, a realistic example).
So now we have calculated C(x) using basic equilibrium formulae. The only unknowns left are B(x) and B(y). Note that in Fig. 3 these forces are drawn in the opposite directions to C(x) and A(y) respectively. To calculate these we have two choices � balancing moments about either A or C, or balancing forces in the X and Y directions. Balancing the forces is easier since in this example all the forces are either horizontal or vertical, and we have no measurements for some of the distances necessary to sum moments about A or C.
SF(x) = 0
= C(x) � B(x) Minus B(x) because it is acting in the negative direction
\ C(x) = B(x)
B(x) = C(x) = 1500N
SF(y) = 0
= A(y) � B(y)
\ A(y) = B(y) = 500N
Hence we now have the reaction forces (Fig. 4)
Now consider a free body diagram of a wheel with a disc brake rotor attached, under braking forces. Assume the caliper is directly above the axle for ease of calculation. (Fig. 5)
Assume that the bike, despite braking, is maintaining a constant speed (as though it�s rolling down a hill with the brakes applied to a level where constant speed is held). Due to the wheel�s axisymmetric structure (it is identical all the way around, ie everything is concentric about the axle � brake rotor, rim/tyre etc), if we are to neglect the wheel�s own rotational momentum (because relative to the other forces/momentums at play, it can be considered insignificant) then the wheel can be modeled as though it is in static equilibrium (since we�re not worried about loads internal to the wheel, only the external forces and reactions) � all (external) forces and moments sum to zero. Assume the radius of the whole wheel (to the outside of the tyre) is 0.33m (13�) and the radius of the disc rotor is 100mm (4�). Let us choose an arbitrary force for T(x), which we will say is 200N. Take positive rotation to be clockwise.
Thus:
SM(A) = 0 summing moments about the axle
= [T(x) * -0.33] + [D(x) * 0.1]
= [200 * -0.33] + [D(x) * 0.1]
200 * 0.33 = D(x) * 0.1
\ D(x) = 660N
SF(x) = 0
= D(x) + T(x) � A(x)
= 660 + 200 � A(x)
\ A(x) = 860N (pointing to the left in the diagram)
SF(y) = 0
= T(y) � A(y)
\ A(y) = T(y)
If we take axle force to be 500N once again, then
A(y) = T(y) = 500N
Now we will look at the reaction forces acting on the swingarm. Note that the forces are identical in magnitude at all points of attachment/contact with the wheel (that is, the axle and the caliper) but act on the swingarm in the opposite direction to the directions they act on the wheel (Newton�s action/reaction pairs). (Fig. 6)
Note that the force acting horizontally on the axle (with regards to the frame, not the wheel) is the sum of the frictional force on the tyre, and the frictional force on the brake rotor, and that it is always higher in magnitude than the braking frictional force between the caliper/rotor � if it wasn�t, braking would actually accelerate the bike forwards due to a net forwards force acting on it (which obviously is impossible).
From here we have two options to analyse the effect of this braking force on the swingarm. Firstly and most obviously, we can simply use each point force (X and Y components acting on the axle, and the X component on the brake caliper) and their respective normal distances from the main pivot (at B) to calculate the moment about B and thus the reaction force C(x) (as well as the reactions B(x) and B(y) if we so desire). If the reaction force C(x) increases, then that means that the shock�s resistance/spring force has to increase (and the opposite is obviously also true). Given the nature of springs, we know that to increase the shock�s reaction force, it has to sit further into its stroke in order to compress the spring to suit.
The second method, and one which will prove more useful later on when considering linkage bikes/floating brakes, is to consider the forces acting on the swingarm from the caliper and the axle as a single couple moment (generated by the caliper force pushing forwards, and an equal force pushing backwards at the axle so as to have no net force in any direction) plus a horizontal force at the axle instead of two separate forces. In the diagrams shown, this couple moment would be anti-clockwise. This method has the advantage of being able to separate these two components so that we can recognise the following things:
- Regardless of the orientation of the caliper or its distance from the axle, the couple moment will remain the same for any given frictional force on the tyre; this is because that frictional force multiplied by the radius of the wheel is what gives the magnitude of the moment and it is independent of rotor size (note though that the caliper/axle forces change inversely proportional to rotor radius however).
- There are two elements which can semi-independently cause BISI, and thus are separable: these are axle path/horizontal axle force and the couple moment. Couple moments can easily be removed from the equation of by parallel linkages (including floating brakes) which will be covered later, and the horizontal force acting on the axle needs a moment arm (perpendicular to the line of force, so in other words a vertical distance) between the axle and the swingarm pivot, in order to generate a moment about the pivot. As such, both factors need to be taken into account when considering brake interference. It is possible (but not necessarily desirable) to create a setup where these two factors cancel each other out (this will be elaborated on later).
- What determines the amount of squat (or jack, but that will be dealt with later) is determined by two things: the height of the pivot (or instant centre, explanation of instant centre to follow shortly), and the length of the swingarm. The height of the pivot/IC is what determines the vertical distance (which is the moment arm as mentioned before) between the pivot and the axle, and so a higher pivot = longer moment arm = more squat generated by horizontal axle forces. The length of the swingarm changes the effects of the couple moment (which is effectively a constant for whatever calculation you�re doing) by altering the moments generated by the vertical force on the axle and the force of the shock on the swingarm, about the main pivot. For example, if, as above, the axle was 0.45m from the main pivot and the vertical force on the axle was 500N, the moment generated by that (which has to be equaled by the shock�s force multiplied by its normal distance [0.15m] from the pivot) would be 225N.m. A couple moment of say 22.5N.m would be an increase of 10% in this case, which if the shock rate was perfectly linear, would make the bike sit 10% further into its travel in order to regain equilibrium. Now consider that the swingarm was twice the size in every dimension; ie axle to pivot is 0.9m, and pivot to shock mount is 0.3m. The shock ratio is still the same so the shock doesn�t have to supply any additional force at equilibrium. However, the moments (note that these are not �net� moments and as such we are not concerned with acceleration) are now doubled also due to the doubled moment arms � that is to say, the axle force/swingarm length would yield a moment of (0.9 * 500 = 450N.m) that the shock would obviously balance out in the opposite direction. However, an addition of the 22.5N.m couple moment via braking is only a 5% increase now, half of what it was before. From this we can see that swingarm length is inversely proportional to squat generated by the couple moment alone.
02-23-06, 04:41 AM
#33
Ride bike or bike ride?
Join Date: Oct 2003
Location: Adelaide, Australia
Posts: 1,447
Bikes: MongoosePro DH, Dart custom road bike, .243 Racing FR street bike
Mentioned: 0 Post(s)
Tagged: 0 Thread(s)
Quoted: 0 Post(s)
Likes: 0
Liked 0 Times
in
0 Posts
Instant centre theory:
In a true 4-bar linkage (this includes FSR, VPP, DW-link, Lawwill etc, as well as floating brake linkages), ie not linkage-driven singlepivots, the instant centre (IC) of zero velocity is a point about which everything in the �isolated� link (the rear triangle/seatstays) is moving tangent to. A good explanation can be found here https://www.mtbcomprador.com/pa/engli...#InstantCenter, I highly recommend reading it. Please note the mention of a �constant centre� also.
With respect to braking performance, forces/reactions on a 4-bar linkage bike can be calculated at any instant in the same way as a singlepivot (as demonstrated above) by using the distance from axle to IC as the length of the swingarm when trying to determine the effect of the couple moment. If the linkage is a parallelogram (as many floating brakes are) or the links are parallel at that point, then the IC will be at an infinite distance away, and as such the couple moment will have no (direct) effect on the suspension�s state (it will not attempt to compress or extend the suspension). If the linkage is a parallelogram, then you will note that the axle�s tangent path is parallel to the tangent path of each of the two �arms� of the linkage. From this we can see that it must have a centre of curvature that is fixed, which can be placed relative to the forward pivots, identically to how the axle is placed relative to the two rear pivots. (Fig. 7)
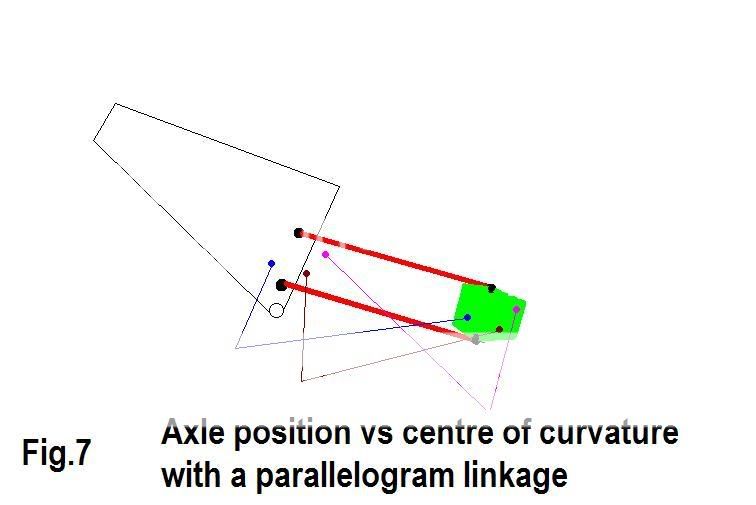
In order to calculate the moment acting on the suspension due to the horizontal force on the axle, the vertical displacement between axle and main pivot (on a singlepivot) can be substituted for the vertical distance between the axle and the centre of curvature here. Calculating the reaction forces at the shock and pivots however, is more complex due to the linkage setup. If you are proficient with basic vector calculations and trigonometry (or instant centre theory in its entirety), you should be able to calculate these reactions. However, the calculations are too variable and numerous to demonstrate here.
A few notes:
- The vast majority of bikes have some amount of brake squat. Very few bikes actually have brake �jack�, but apparently that doesn�t stop every man and his dog misusing the term �brake jack�.
- Generally the instant centre of any bike is in front of the axle. Some bikes have ICs that are behind the axle (such as Lawwills) which due to the brake�s couple moment effect may tend to develop a next extension force under braking � but, and this is a big but, having an IC behind the axle does not automatically necessitate that a bike will �jack� (extend), due to the horizontal axle force giving an equal or greater moment trying to create squat.
- All demonstrations of calculations above are for conceptual explanation only � they make assumptions for the sake of simplicity which make them mathematically inaccurate (by which I mean not exact, not that they give a �wrong� answer/idea). They are used only to give the reader some basic understanding of how the main calculations are performed. The inertia of the wheel, brake, linkage/swingarm etc have been ignored thus far, and all calculations have been assumed to be at equilibrium � this is not precisely the case in the real world, but it will suffice purely for the purpose of conceptual demonstration.
- It is possible, although not necessarily desirable, to have a suspension setup which does not have a squatting or extending tendency under brakes (at a given instant or instances). This, I believe, should be kept separate in terminology, from suspension extension due to weight shift. It is fairly easy to understand that if the brake torque/axle reaction force doesn�t exhibit a compressive or extensive force/moment on the suspension AT ALL, then under any braking the suspension will extend due to weight shifting forwards. For this reason, it may be useful to have some amount of pro-squat (tendency to compress). I know of no situations where it is helpful to have anti-squat (a net extension force, in other words actual �brake jack�) under brakes, as this only exaggerates the forwards weight transfer.
- The �couple moment� and �horizontal force on axle� effects can be treated as independently as above in all situations � note that in some cases, one can be negative whilst the other is positive, reducing either the pro- or anti-squat reaction under braking (depending which one has a greater effect).
- All calculations above work for all situations that I know of. That is, to my understanding, this explanation is universally applicable.
- There are other factors which I have not bothered to mention due to their relative consistency between bicycles, such as centre of mass, shock rate etc. These do have an effect on braking, believe it or not, but their contribution is not significant enough (as well as being much more complex) to be worth mentioning in this article.
- Parallelogram linkages and floating brakes do remove the couple moment component of BISI, but they do not (necessarily) make any change to the effect of the horizontal force on the axle. On many (singlepivot) bikes a floating brake makes a considerable difference to the braking characteristics because of said removal of couple moment component, however this does not completely eliminate all brake-induced effects on the suspension (for better or worse).
- There are other ways to explain braking characteristics, as far as I know these are all in agreement with what is written above. A common way is, with acceptance of the internal forces within the wheel/swingarm, to simply consider the rear wheel contact patch (and the frictional force acting on the wheel at that point) with relation to the IC, and nothing else. This is a perfectly viable method of calculation/comprehension, but I have chosen to explain it differently because separation of the two main components of brake interaction shows more clearly how the forces internal to the suspension can separately affect the suspension and how they can be manipulated to give the desired effect.
- The claim that bikes will �brake jack� and/or �lock up/out under brakes� should always be treated with suspicion. This is nearly always untrue or inaccurate � braking does not �lock out� any bikes, and in no circumstances that I am aware of is braking capable of bottoming out a properly set-up bike. True brake �jack� (extension) can give the rider the impression that the bike has stiffened suddenly, but unlike a rigid/locked out bike, the braking extension tendency is not a reaction to a vertical (bump) force, and as such will not be immovable or rigid, as those forces can be overcome.
The end result: what does it mean?
Most bikes squat to some degree. This is not necessarily a bad thing, as mentioned above. This includes most FSR bikes, despite Specialized�s �fully active in all circumstances� claim (with the understanding that "fully active" means "shock absorption completely unaffected by braking"). Some bikes do actually �jack� but these are few and far between, and it�s not always bad enough to even be noticeable, let alone a problem. There is a definite placebo effect surrounding brake systems, and it is not unlikely that this is due mainly to lack of education/understanding on the subject. Some people will swear black and blue that singlepivots are nearly unrideable due to perceived �brake jack�, others will simply state that they�ve never even noticed it. From this we can make a logical conclusion: BISI does exist, and that it is not necessarily a problem � in fact in some forms and to some degrees it can even be useful. However it is hard to believe that any common amount of brake squat can make a bike unrideable, or anything to that end. Notably, the bike on which Fabien Barel won the 2004 world DH championships on had a brake linkage designed specifically to increase the level of (pro-)squat far beyond what normal bikes generate. Riding the production version of this bike, you can feel a huge tendency for the rear end to dive when the rear brake is applied. Given that no owners of those bikes seem to have any problem with the extreme brake setup, one might logically assume that it�s not actually that bad, and that other bikes with considerably less brake induced squat can hardly be any worse off, and thus are perfectly fine to ride � although not necessarily as comfortable as they could be.
The moral of the story is that almost any pro-squatting braking setup is usable. That is not to say that there is no reason to dislike certain degrees of brake interaction � that varies with riding style, terrain and personal preferences. Another important point to note is that true �neutrality� under any acceleration (positive [pedalling] or negative [braking]) is not necessarily an optimum setup � certain reaction forces under braking/pedalling can help stabilise the bike as well as offer greater comfort and traction. It is also useful to know that it�s not hard to make stuff perform worse, so be wary of playing with your bike�s braking characteristics unless you know what you�re doing � that incorporates more than is written in this article.
All content remains copyright to Kenneth Sasaki, to whose work I linked regarding instant centres. Feel free to reproduce it as long as full credit is given. This permission from him.
Finally
What I am trying to say is there are different strokes for different folks, ride what feels best to you and don't let comapnies that have spent lots of time and money on a thing such as brake squat think not to buy a bike, it is a marketing thing. Oranges are light and hand built, Specialized have active suspension, Cannondale's are built in America...... it is all marketing, ride what you think feels best, not what you are told feels best!
In a true 4-bar linkage (this includes FSR, VPP, DW-link, Lawwill etc, as well as floating brake linkages), ie not linkage-driven singlepivots, the instant centre (IC) of zero velocity is a point about which everything in the �isolated� link (the rear triangle/seatstays) is moving tangent to. A good explanation can be found here https://www.mtbcomprador.com/pa/engli...#InstantCenter, I highly recommend reading it. Please note the mention of a �constant centre� also.
With respect to braking performance, forces/reactions on a 4-bar linkage bike can be calculated at any instant in the same way as a singlepivot (as demonstrated above) by using the distance from axle to IC as the length of the swingarm when trying to determine the effect of the couple moment. If the linkage is a parallelogram (as many floating brakes are) or the links are parallel at that point, then the IC will be at an infinite distance away, and as such the couple moment will have no (direct) effect on the suspension�s state (it will not attempt to compress or extend the suspension). If the linkage is a parallelogram, then you will note that the axle�s tangent path is parallel to the tangent path of each of the two �arms� of the linkage. From this we can see that it must have a centre of curvature that is fixed, which can be placed relative to the forward pivots, identically to how the axle is placed relative to the two rear pivots. (Fig. 7)
In order to calculate the moment acting on the suspension due to the horizontal force on the axle, the vertical displacement between axle and main pivot (on a singlepivot) can be substituted for the vertical distance between the axle and the centre of curvature here. Calculating the reaction forces at the shock and pivots however, is more complex due to the linkage setup. If you are proficient with basic vector calculations and trigonometry (or instant centre theory in its entirety), you should be able to calculate these reactions. However, the calculations are too variable and numerous to demonstrate here.
A few notes:
- The vast majority of bikes have some amount of brake squat. Very few bikes actually have brake �jack�, but apparently that doesn�t stop every man and his dog misusing the term �brake jack�.
- Generally the instant centre of any bike is in front of the axle. Some bikes have ICs that are behind the axle (such as Lawwills) which due to the brake�s couple moment effect may tend to develop a next extension force under braking � but, and this is a big but, having an IC behind the axle does not automatically necessitate that a bike will �jack� (extend), due to the horizontal axle force giving an equal or greater moment trying to create squat.
- All demonstrations of calculations above are for conceptual explanation only � they make assumptions for the sake of simplicity which make them mathematically inaccurate (by which I mean not exact, not that they give a �wrong� answer/idea). They are used only to give the reader some basic understanding of how the main calculations are performed. The inertia of the wheel, brake, linkage/swingarm etc have been ignored thus far, and all calculations have been assumed to be at equilibrium � this is not precisely the case in the real world, but it will suffice purely for the purpose of conceptual demonstration.
- It is possible, although not necessarily desirable, to have a suspension setup which does not have a squatting or extending tendency under brakes (at a given instant or instances). This, I believe, should be kept separate in terminology, from suspension extension due to weight shift. It is fairly easy to understand that if the brake torque/axle reaction force doesn�t exhibit a compressive or extensive force/moment on the suspension AT ALL, then under any braking the suspension will extend due to weight shifting forwards. For this reason, it may be useful to have some amount of pro-squat (tendency to compress). I know of no situations where it is helpful to have anti-squat (a net extension force, in other words actual �brake jack�) under brakes, as this only exaggerates the forwards weight transfer.
- The �couple moment� and �horizontal force on axle� effects can be treated as independently as above in all situations � note that in some cases, one can be negative whilst the other is positive, reducing either the pro- or anti-squat reaction under braking (depending which one has a greater effect).
- All calculations above work for all situations that I know of. That is, to my understanding, this explanation is universally applicable.
- There are other factors which I have not bothered to mention due to their relative consistency between bicycles, such as centre of mass, shock rate etc. These do have an effect on braking, believe it or not, but their contribution is not significant enough (as well as being much more complex) to be worth mentioning in this article.
- Parallelogram linkages and floating brakes do remove the couple moment component of BISI, but they do not (necessarily) make any change to the effect of the horizontal force on the axle. On many (singlepivot) bikes a floating brake makes a considerable difference to the braking characteristics because of said removal of couple moment component, however this does not completely eliminate all brake-induced effects on the suspension (for better or worse).
- There are other ways to explain braking characteristics, as far as I know these are all in agreement with what is written above. A common way is, with acceptance of the internal forces within the wheel/swingarm, to simply consider the rear wheel contact patch (and the frictional force acting on the wheel at that point) with relation to the IC, and nothing else. This is a perfectly viable method of calculation/comprehension, but I have chosen to explain it differently because separation of the two main components of brake interaction shows more clearly how the forces internal to the suspension can separately affect the suspension and how they can be manipulated to give the desired effect.
- The claim that bikes will �brake jack� and/or �lock up/out under brakes� should always be treated with suspicion. This is nearly always untrue or inaccurate � braking does not �lock out� any bikes, and in no circumstances that I am aware of is braking capable of bottoming out a properly set-up bike. True brake �jack� (extension) can give the rider the impression that the bike has stiffened suddenly, but unlike a rigid/locked out bike, the braking extension tendency is not a reaction to a vertical (bump) force, and as such will not be immovable or rigid, as those forces can be overcome.
The end result: what does it mean?
Most bikes squat to some degree. This is not necessarily a bad thing, as mentioned above. This includes most FSR bikes, despite Specialized�s �fully active in all circumstances� claim (with the understanding that "fully active" means "shock absorption completely unaffected by braking"). Some bikes do actually �jack� but these are few and far between, and it�s not always bad enough to even be noticeable, let alone a problem. There is a definite placebo effect surrounding brake systems, and it is not unlikely that this is due mainly to lack of education/understanding on the subject. Some people will swear black and blue that singlepivots are nearly unrideable due to perceived �brake jack�, others will simply state that they�ve never even noticed it. From this we can make a logical conclusion: BISI does exist, and that it is not necessarily a problem � in fact in some forms and to some degrees it can even be useful. However it is hard to believe that any common amount of brake squat can make a bike unrideable, or anything to that end. Notably, the bike on which Fabien Barel won the 2004 world DH championships on had a brake linkage designed specifically to increase the level of (pro-)squat far beyond what normal bikes generate. Riding the production version of this bike, you can feel a huge tendency for the rear end to dive when the rear brake is applied. Given that no owners of those bikes seem to have any problem with the extreme brake setup, one might logically assume that it�s not actually that bad, and that other bikes with considerably less brake induced squat can hardly be any worse off, and thus are perfectly fine to ride � although not necessarily as comfortable as they could be.
The moral of the story is that almost any pro-squatting braking setup is usable. That is not to say that there is no reason to dislike certain degrees of brake interaction � that varies with riding style, terrain and personal preferences. Another important point to note is that true �neutrality� under any acceleration (positive [pedalling] or negative [braking]) is not necessarily an optimum setup � certain reaction forces under braking/pedalling can help stabilise the bike as well as offer greater comfort and traction. It is also useful to know that it�s not hard to make stuff perform worse, so be wary of playing with your bike�s braking characteristics unless you know what you�re doing � that incorporates more than is written in this article.
All content remains copyright to Kenneth Sasaki, to whose work I linked regarding instant centres. Feel free to reproduce it as long as full credit is given. This permission from him.
Finally
What I am trying to say is there are different strokes for different folks, ride what feels best to you and don't let comapnies that have spent lots of time and money on a thing such as brake squat think not to buy a bike, it is a marketing thing. Oranges are light and hand built, Specialized have active suspension, Cannondale's are built in America...... it is all marketing, ride what you think feels best, not what you are told feels best!
